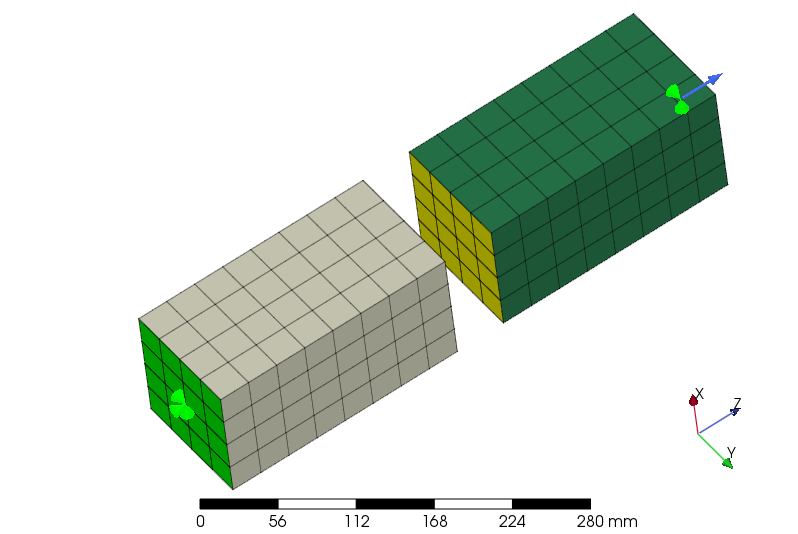
You could use 3 SPRING2 elements and attach them to rigid body reference nodes. Like this:
*Node
1, 0.00000000E+000, 0.00000000E+000, 0.00000000E+000
2, 0.00000000E+000, 0.00000000E+000, 1.00000000E+001
3, 0.00000000E+000, 1.00000000E+001, 0.00000000E+000
4, 0.00000000E+000, 1.00000000E+001, 1.00000000E+001
5, 1.00000000E+001, 0.00000000E+000, 0.00000000E+000
6, 1.00000000E+001, 0.00000000E+000, 1.00000000E+001
7, 1.00000000E+001, 1.00000000E+001, 0.00000000E+000
8, 1.00000000E+001, 1.00000000E+001, 1.00000000E+001
9, 0.00000000E+000, 0.00000000E+000, 5.00000000E+000
10, 0.00000000E+000, 5.00000000E+000, 0.00000000E+000
11, 0.00000000E+000, 1.00000000E+001, 5.00000000E+000
12, 0.00000000E+000, 5.00000000E+000, 1.00000000E+001
13, 1.00000000E+001, 0.00000000E+000, 5.00000000E+000
14, 1.00000000E+001, 5.00000000E+000, 0.00000000E+000
15, 1.00000000E+001, 1.00000000E+001, 5.00000000E+000
16, 1.00000000E+001, 5.00000000E+000, 1.00000000E+001
17, 5.00000000E+000, 0.00000000E+000, 0.00000000E+000
18, 5.00000000E+000, 0.00000000E+000, 1.00000000E+001
19, 5.00000000E+000, 1.00000000E+001, 0.00000000E+000
20, 5.00000000E+000, 1.00000000E+001, 1.00000000E+001
21, 0.00000000E+000, 5.00000000E+000, 5.00000000E+000
22, 1.00000000E+001, 5.00000000E+000, 5.00000000E+000
23, 5.00000000E+000, 0.00000000E+000, 5.00000000E+000
24, 5.00000000E+000, 1.00000000E+001, 5.00000000E+000
25, 5.00000000E+000, 5.00000000E+000, 0.00000000E+000
26, 5.00000000E+000, 5.00000000E+000, 1.00000000E+001
27, 5.00000000E+000, 5.00000000E+000, 5.00000000E+000
28, 1.50000000E+001, 0.00000000E+000, 0.00000000E+000
29, 1.50000000E+001, 0.00000000E+000, 1.00000000E+001
30, 1.50000000E+001, 1.00000000E+001, 0.00000000E+000
31, 1.50000000E+001, 1.00000000E+001, 1.00000000E+001
32, 2.50000000E+001, 0.00000000E+000, 0.00000000E+000
33, 2.50000000E+001, 0.00000000E+000, 1.00000000E+001
34, 2.50000000E+001, 1.00000000E+001, 0.00000000E+000
35, 2.50000000E+001, 1.00000000E+001, 1.00000000E+001
36, 1.50000000E+001, 0.00000000E+000, 5.00000000E+000
37, 1.50000000E+001, 5.00000000E+000, 0.00000000E+000
38, 1.50000000E+001, 1.00000000E+001, 5.00000000E+000
39, 1.50000000E+001, 5.00000000E+000, 1.00000000E+001
40, 2.50000000E+001, 0.00000000E+000, 5.00000000E+000
41, 2.50000000E+001, 5.00000000E+000, 0.00000000E+000
42, 2.50000000E+001, 1.00000000E+001, 5.00000000E+000
43, 2.50000000E+001, 5.00000000E+000, 1.00000000E+001
44, 2.00000000E+001, 0.00000000E+000, 0.00000000E+000
45, 2.00000000E+001, 0.00000000E+000, 1.00000000E+001
46, 2.00000000E+001, 1.00000000E+001, 0.00000000E+000
47, 2.00000000E+001, 1.00000000E+001, 1.00000000E+001
48, 1.50000000E+001, 5.00000000E+000, 5.00000000E+000
49, 2.50000000E+001, 5.00000000E+000, 5.00000000E+000
50, 2.00000000E+001, 0.00000000E+000, 5.00000000E+000
51, 2.00000000E+001, 1.00000000E+001, 5.00000000E+000
52, 2.00000000E+001, 5.00000000E+000, 0.00000000E+000
53, 2.00000000E+001, 5.00000000E+000, 1.00000000E+001
54, 2.00000000E+001, 5.00000000E+000, 5.00000000E+000
55, 1.00000000E+001, 5.00000000E+000, 5.00000000E+000
56, 1.00000000E+001, 5.00000000E+000, 5.00000000E+000
57, 1.50000000E+001, 5.00000000E+000, 5.00000000E+000
58, 1.50000000E+001, 5.00000000E+000, 5.00000000E+000
*Element, Type=C3D8, Elset=Solid_part-1
1, 21, 9, 1, 10, 27, 23, 17, 25
2, 27, 23, 17, 25, 22, 13, 5, 14
3, 11, 21, 10, 3, 24, 27, 25, 19
4, 24, 27, 25, 19, 15, 22, 14, 7
5, 12, 2, 9, 21, 26, 18, 23, 27
6, 26, 18, 23, 27, 16, 6, 13, 22
7, 4, 12, 21, 11, 20, 26, 27, 24
8, 20, 26, 27, 24, 8, 16, 22, 15
*Element, Type=C3D8, Elset=Solid_part-2
9, 48, 36, 28, 37, 54, 50, 44, 52
10, 54, 50, 44, 52, 49, 40, 32, 41
11, 38, 48, 37, 30, 51, 54, 52, 46
12, 51, 54, 52, 46, 42, 49, 41, 34
13, 39, 29, 36, 48, 53, 45, 50, 54
14, 53, 45, 50, 54, 43, 33, 40, 49
15, 31, 39, 48, 38, 47, 53, 54, 51
16, 47, 53, 54, 51, 35, 43, 49, 42
*ELEMENT, TYPE=SPRING2, ELSET=SPRING_X
100,55,57
*ELEMENT, TYPE=SPRING2, ELSET=SPRING_Y
200,55,57
*ELEMENT, TYPE=SPRING2, ELSET=SPRING_Z
300,55,57
*SPRING, ELSET=SPRING_X
1,1
100.
*SPRING, ELSET=SPRING_Y
2,2
100.
*SPRING, ELSET=SPRING_Z
3,3
100.
*Nset, Nset=Internal_Selection-1_Rigid_Body-1
5, 6, 7, 8, 13, 14, 15, 16, 22
*Nset, Nset=Internal_Selection-1_Rigid_Body-2
28, 29, 30, 31, 36, 37, 38, 39, 48
*Nset, Nset=Internal_Selection-1_Fixed-1
1, 2, 3, 4, 9, 10, 11, 12, 21
*Nset, Nset=Internal_Selection-1_Displacement_Rotation-1
32, 33, 34, 35, 40, 41, 42, 43, 49
*Nset, Nset=Reference_Point-1_ref_55
55
*Nset, Nset=Reference_Point-1_rot_56
56
*Nset, Nset=Reference_Point-2_ref_57
57
*Nset, Nset=Reference_Point-2_rot_58
58
*Elset, Elset=Internal_Selection-1_Solid_Section-1
Solid_part-1,
Solid_part-2
*Material, Name=S235
*Elastic
210000, 0.28
*Solid section, Elset=Internal_Selection-1_Solid_Section-1, Material=S235
*Rigid body, Nset=Internal_Selection-1_Rigid_Body-1, Ref node=55, Rot node=56
*Rigid body, Nset=Internal_Selection-1_Rigid_Body-2, Ref node=57, Rot node=58
*Step
*Static
*Boundary
Internal_Selection-1_Fixed-1, 1, 6, 0
*Boundary
Internal_Selection-1_Displacement_Rotation-1, 1, 1, 0
Internal_Selection-1_Displacement_Rotation-1, 2, 2, 0
Internal_Selection-1_Displacement_Rotation-1, 3, 3, 1
*Node file
RF, U
*El file
S, E, NOE
*End step