Acceleration noise comes from the derivation scheme.
I have use the direct solver to have a constant time step of 0.002 (this way errors coming from discrepancy in the time increment disappear)
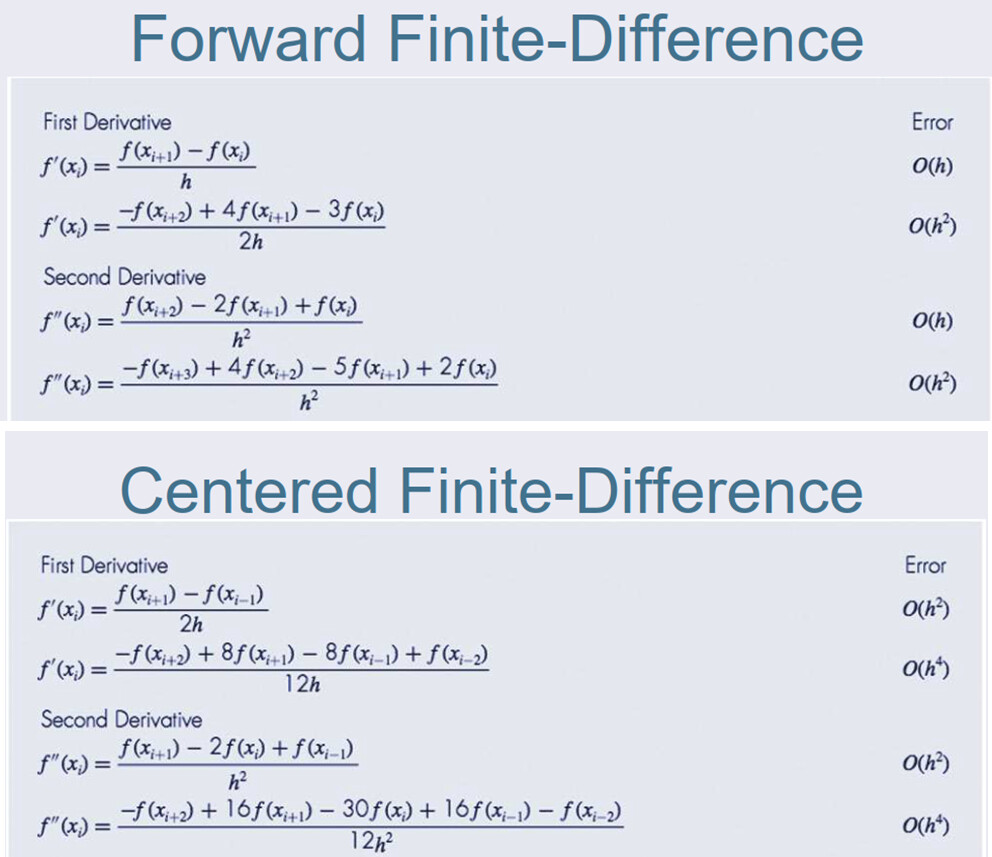
I have applied a Forward Finite-Difference for the first two point O(h2).
I have applied a Centered Finite-Difference for intermediate points O(h4).
I have applied a Backward Finite-Difference for the Last two point O(h2).
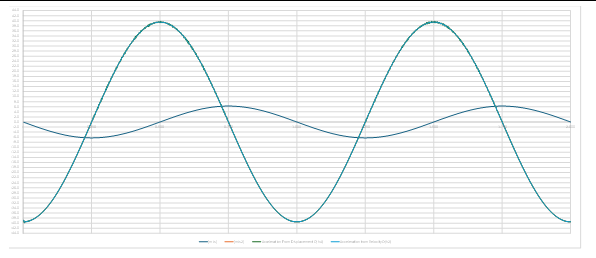
I have computed acceleration directly from displacements.
Noise has disappeared.
I don’t have skills to dive into the ccx code to find the derivation scheme for velocity but It could be interesting to find how it’s done.Specially for the first points when time increment in not regular.